Der Roboter-Gepard ist eine der beliebtesten Erfindungen, die das MIT im 21. Jahrhundert entwickelt hat. Sein Design, seine Geschwindigkeit, Größe, Kraft und Sprungfähigkeit haben ihn zu einem Liebling der Fans gemacht und ihm reale Anwendungen gegeben.
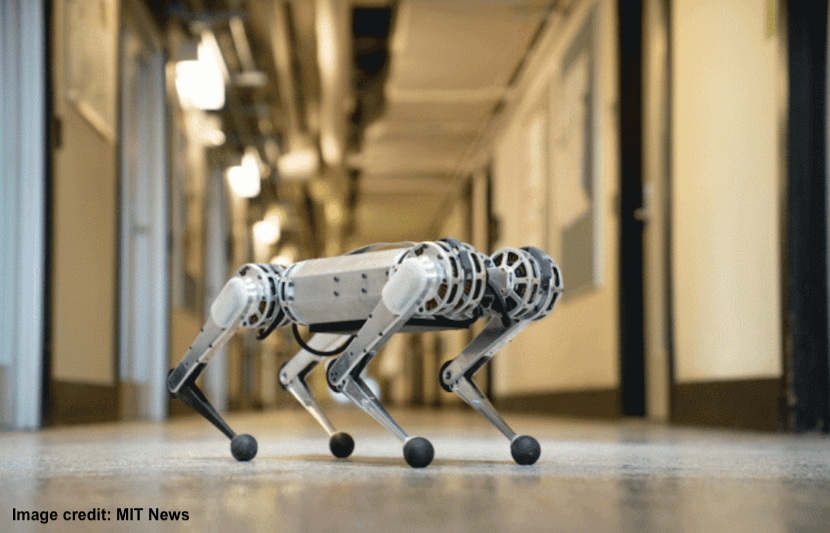
Nun wird ein Roboter der dritten Generation, genannt Cheetah 3, kann sich schnell über unwegsames Gelände bewegen, mit Schutt bedeckte Treppen erklimmen und leicht das Gleichgewicht wiedererlangen, wenn es geschoben oder gezogen wird, ohne jegliche Sicht.
Der 90 Pfund schwere, „blinde“ Roboter könnte schließlich Kraftwerksinspektionen durchführen, sich seinen Weg durch Kanalisationssysteme bahnen, Menschen bei Gebäudebränden retten und die Mobilität der älteren Bevölkerung verbessern.
Statt sich auf Kameras zu verlassen, tastet sich die mechanische Katze mit „blinder Fortbewegung“ durch ihre Umgebung.
„Die Technologie der blinden Fortbewegung macht den Roboter viel robuster gegenüber unerwarteten Situationen wie dem Betreten von Hindernissen oder Kollisionen mit unmodellierten Objekten“, sagte Sangbae Kim, außerordentlicher Professor für Maschinenbau am MIT und Designer des Roboters.
„Die Sicht kann laut, leicht ungenau und manchmal nicht verfügbar sein, und wenn Sie sich zu sehr auf die Sicht verlassen, muss Ihr Roboter sehr genau in der Position sein und wird schließlich langsam sein”, sagte er in einer Erklärung. „Deshalb wollen wir, dass sich der Roboter mehr auf taktile Informationen verlässt. Auf diese Weise kann es unerwartete Hindernisse überwinden, während es sich schnell fortbewegt.“
Im Vergleich zum Cheetah 2 verfügt dieser neue Roboter über eine verbesserte Software und einen erweiterten Bewegungsbereich.
Es kann sich nach vorne und hinten strecken und von einer Seite zur anderen drehen, was es wendig und athletisch wie eine große Katze macht.
Fortgeschrittene Algorithmen
Bis zu diesem Zeitpunkt haben die Forscher des MIT Labor für biomimetische Robotik hatte keine Maschine mit effektiver Mobilität in unwegsamem Gelände entwickelt.
Zwei neue Algorithmen – ein Kontakterkennungsalgorithmus und ein modellprädiktiver Steueralgorithmus – geben dem Cheetah 3 die Möglichkeit, schnell sein Gleichgewicht wiederherzustellen, durch schwieriges Gelände zu wandern, Treppen hochzufahren und sich mit der Effizienz eines Tieres zu bewegen.

Der Kontakterkennungsalgorithmus ermöglicht es dem Roboter zu verstehen, wann er ein bestimmtes Bein vom Schwingen stoppen und auf den Boden stellen sollte.
Dieser Algorithmus verhindert, dass der Roboter das Gleichgewicht verliert, weil er weiß, ob er beim Auftreffen auf ein Hindernis mit einem Schritt durchziehen oder sein Bein zurückziehen muss.
Damit der Roboter weiß, wann er die Beine wechseln muss, berücksichtigt er ständig drei Wahrscheinlichkeiten – die eines Beins, das den Boden berührt, die vom Bein erzeugte Kraft, die den Boden berührt, und ob sich das Bein mitten im Schwung befindet.
Der Algorithmus berechnet die Wahrscheinlichkeiten basierend auf Daten von Beschleunigungsmessern, Gyroskopen und dem Winkel und der Höhe jedes Beins in Bezug auf den Boden.
Der Körper des Roboters kann auf unerwartete Hindernisse reagieren. Wenn es auf etwas tritt, passen sich sein Körper und seine Beine an, damit es das Gleichgewicht halten kann.
„Wenn Menschen unsere Augen schließen und einen Schritt machen, haben wir ein mentales Modell dafür, wo der Boden sein könnte, und können uns darauf vorbereiten. Aber wir verlassen uns auch auf das Gefühl, den Boden zu berühren“, sagte Kim in einer Erklärung. „Wir machen das Gleiche, indem wir mehrere [Quellen von] Informationen kombinieren, um die Übergangszeit zu bestimmen.“
Der modellprädiktive Steuerungsalgorithmus bestimmt, wie viel Kraft der Roboter bei jedem Schritt auf jedes Bein ausüben soll, damit er seinen Körper am effektivsten bewegen kann.
Genauer gesagt funktioniert der Algorithmus, indem er eine halbe Sekunde in die Zukunft blickt, um die richtige Position von Körper und Beinen des Roboters zu berechnen.
„Angenommen, jemand tritt den Roboter zur Seite“, sagte Kim in einer Erklärung. „Wenn der Fuß schon auf dem Boden steht, entscheidet der Algorithmus: ‚Wie soll ich die Kräfte auf den Fuß spezifizieren? Da ich links eine unerwünschte Geschwindigkeit habe, möchte ich eine Kraft in die entgegengesetzte Richtung aufbringen, um diese Geschwindigkeit zu töten. Wenn ich 100 Newton in dieser entgegengesetzten Richtung anwende, was passiert dann eine halbe Sekunde später?' ”
Der Algorithmus führt diese Berechnungen 20 Mal pro Sekunde durch.
Um es zu testen, schubsten, zogen und rissen die Forscher den Roboter, während er auf einem Laufband ging.
Die Forscher werden Cheetah 3 im Oktober auf der Internationale Konferenz über intelligente Roboter, in Madrid.
Real-World-Anwendungen
Im Gegensatz zu früheren Cheetah-Robotern wurde der Cheetah 3 entwickelt, um die Sicherheit von Menschen zu gewährleisten.
„Diese Technologie wird es uns ermöglichen, eine Maschine zu entwickeln, die wir in gefährliche Situationen schicken können, anstatt einen Menschen zu schicken“, sagte Kim.
In zwei bis drei Jahren soll die Maschine für die Inspektion von Kraftwerken und Chemieanlagen einsatzbereit sein.
In drei bis fünf Jahren wird es in der Lage sein, durch die Kanalisation zu navigieren, sagte Kim.
In 15 Jahren könnte es möglicherweise jemanden vor einem brennenden Gebäude retten.
Der Cheetah 3 ist bereits in der Lage, Temperaturen und chemische Verbindungen zu messen, schwere Türen zu öffnen und Ventile zu schließen und zu öffnen.
„Durch die Flexibilität der Gliedmaßen kann der Cheetah 3 die Tür mit einem Bein öffnen“, sagte Kim in a Aussage. „Es kann auf drei Beinen stehen und das vierte Glied mit einer maßgeschneiderten Wechselhand ausstatten, um die Tür zu öffnen oder ein Ventil zu schließen.“
Kim glaubt, dass in 20 Jahren ähnlich dynamische Roboter mit Beinen bereit sein könnten, älteren Menschen zu Hause zu helfen.
„Wir haben immer noch keine Technologie, die behinderten oder älteren Menschen helfen kann, nahtlos vom Bett in den Rollstuhl zum Auto und wieder zurück zu gelangen“, sagte er in einer Erklärung.
„Viele ältere Menschen haben Probleme, aus dem Bett aufzustehen und Treppen zu steigen. Manche ältere Menschen mit Kniegelenkproblemen sind zum Beispiel auf ebenem Boden noch recht mobil, können aber nicht ohne Hilfe die Treppe hinuntersteigen. Das ist ein sehr kleiner Bruchteil des Tages, an dem sie Hilfe brauchen. Deshalb suchen wir für die Kurzzeithilfe etwas, das leicht und einfach zu handhaben ist.“
Was kommt als nächstes?
Die Forscher beabsichtigen nicht, dass der Roboter für immer „blind“ bleibt. Tatsächlich haben sie bereits einige Kameras hinzugefügt, um die Umgebung sichtbar zu machen, damit sie große Hindernisse besser erkennt.
Aber im Moment konzentriert sich das Team darauf, die blinde Bewegung des Geparden zu verbessern.
"Wir wollen zuerst einen sehr guten Controller ohne Vision", sagte Kim in einer Erklärung. „Und wenn wir das Sehvermögen hinzufügen, sollte das Bein, auch wenn es Ihnen die falschen Informationen liefert, mit (Hindernissen) umgehen können. Denn was ist, wenn es auf etwas tritt, das eine Kamera nicht sehen kann? Was wird es tun? Hier kann die blinde Fortbewegung helfen. Wir wollen unserer Vision nicht zu sehr vertrauen.“

