
Roboter sind seit langem in Science-Fiction-Romanen und -Filmen vorstellbar, aber die derzeitige Technologie zeigt, dass solche Maschinen kein Phantasieweg mehr sind.
Roboter sind jetzt in der Lage, äußerst detaillierte Aufgaben auszuführen - vom fliegenden Fahrzeug über die Datenberechnung bis hin zu Notfallmaßnahmen und medizinischer Hilfe.
Täglich werden große Schritte unternommen, um verschiedene, intelligente und vielseitige Roboter weiterzuentwickeln, und häufig stehen Frauen bei dieser Arbeit an vorderster Front.
In diesem Artikel stellen wir fünf Frauen vor, die im Bereich der Robotik „töten“.
Sheila Russo
Assistenzprofessor für Maschinenbau an der Boston University
Roboter helfen Menschen in Klassenzimmern, Fabriken und sogar Operationssälen - und Sheila RussoDie jüngste Arbeit mit Soft Robotics ist ein Beispiel dafür.
Russo arbeitete mit einem Team des Wyss Institute for Biological Inspired Engineering in Harvard, der Harvard John A. Paulson School für Technik und angewandte Wissenschaften (SEAS) und der Boston University zusammen, um eine neue Methode zur Herstellung weicher Materialien im Millimeter-Maßstab zu entwickeln, die den Weg ebnet flexible Mikroroboter für medizinische Eingriffe und andere schwer zugängliche Umgebungen.
Russo war als Postdoc am Wyss Institute und am SEAS am Start des Projekts beteiligt.
Weiche Roboter, deren Innen- und Außenseite aus weichen Materialien bestehen, versprechen mehr Flexibilität beim Arbeiten in sich ändernden oder unstrukturierten Umgebungen, als dies mit den herkömmlichen, starren Robotern nicht möglich wäre.
Um ihre neue Technologie zu demonstrieren, entwickelten Russo und ihr Team einen Roboter-Softspider, der in einem neuen Herstellungsverfahren Roboter im Millimeterbereich mit mehreren Funktionen entwarf.
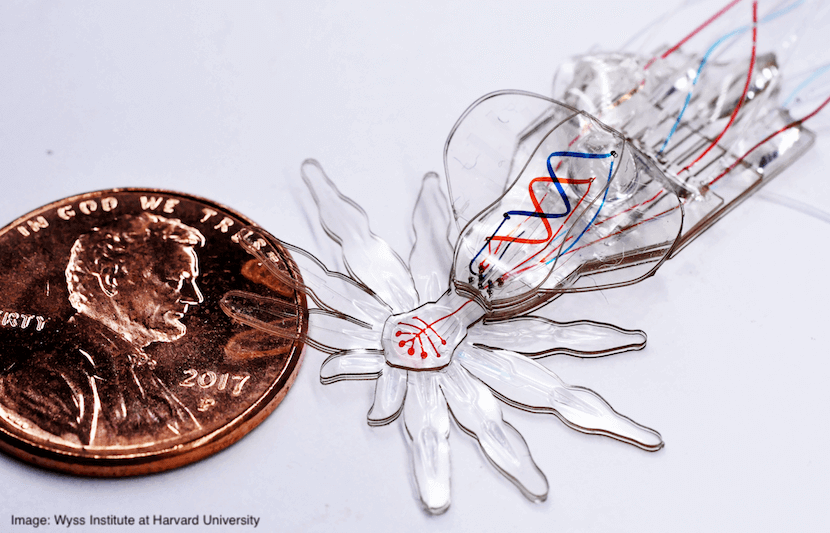
Der Herstellungsprozess, der als MORPH (Microfluidic Origami for Reconfigurable Pneumatic / Hydraulic) bezeichnet wird, kombiniert drei vorhandene Herstellungstechniken: weiche Lithographie, Lasermikrobearbeitung und injektionsinduzierte Selbstfaltung.
Die Forscher glauben, dass dieses neue Verfahren es weichen Robotern ermöglichen wird, hochgradig unstrukturierte und komplexe Umgebungen für verschiedene Anwendungen zu erforschen, von der sicheren und empfindlichen Manipulation von Geweben im menschlichen Körper bis zur Suche und Rettung in gefährlichen Bereichen.
"Die kleinsten Soft-Robot-Systeme sind in der Regel immer noch sehr einfach und haben nur einen Freiheitsgrad. Das bedeutet, dass sie nur eine bestimmte Änderung der Form oder Art der Bewegung auslösen können", sagte Russo in einer Erklärung.
„Durch die Entwicklung einer neuen Hybridtechnologie, die drei verschiedene Herstellungstechniken miteinander verbindet, haben wir eine weiche Roboterspinne aus Silikonkautschuk mit 18-Freiheitsgraden geschaffen, die Änderungen in Struktur, Bewegung und Farbe sowie winzige Merkmale im Mikrometerbereich umfasst. "
[Divider]
Daniela Rus
Direktor des Labors für Informatik und künstliche Intelligenz (CSAIL), MIT
Als Professor für Elektrotechnik und Informatik und Direktor von CSAIL am MIT Daniela Rus hat an einer Vielzahl von Projekten in den Bereichen Robotik, Mobile Computing und Data Science gearbeitet.
Unter diesen Projekten hat Rus einen Roboter geschaffen, der fähig ist Veränderung seines Aussehens und seiner Fähigkeiten durch Veränderung des Exoskeletts. Bekannt als "Primer", ist dieses Roboterdesign eine Abkehr vom traditionellen Denken, bei dem Roboter gebaut werden, um eine Aufgabe zu erfüllen oder einen bestimmten Zweck zu erfüllen.
Stattdessen kann Primer das Formular verwenden, das für eine bestimmte Aufgabe am besten geeignet ist.
Nachdem Rus und ihr Team die Unflexibilität als Hindernis für den Bereich der Robotik angesehen hatten, wollten sie einen Roboter entwickeln, der eine Reihe von Funktionen ohne traditionelle Rückschläge ausführen kann.
"Roboter - und insbesondere Roboter mit starrem Körper, wie sie in Filmen zu sehen sind - sind im Allgemeinen ziemlich unflexibel, da die meisten ihrer Teile eine feste Struktur und einen bestimmten Zweck haben", sagte er Shuhei Miyashita, ein ehemaliger Postdoktorand der CSAIL, der heute Dozent für intelligente Robotik an der University of York in Großbritannien ist.
"Das bedeutet, dass sie nicht einfach entwickelt werden können, um verschiedene Arten von Aufgaben zu erfüllen."
Primer hat ohne Exoskelette das Aussehen eines goldenen Zuckerwürfels. Durch das Anziehen seiner verschiedenen Exoskelette kann er laufen, rollen, segeln und gleiten.
Seine Bewegung wird über Magnete gesteuert, und seine Exoskelette bestehen aus Kunststoffplatten, die sich beim Erhitzen um den Primer falten. Sobald die Aufgabe erledigt ist, wirft Primer das Skelett ab, indem er sich in Wasser taucht.
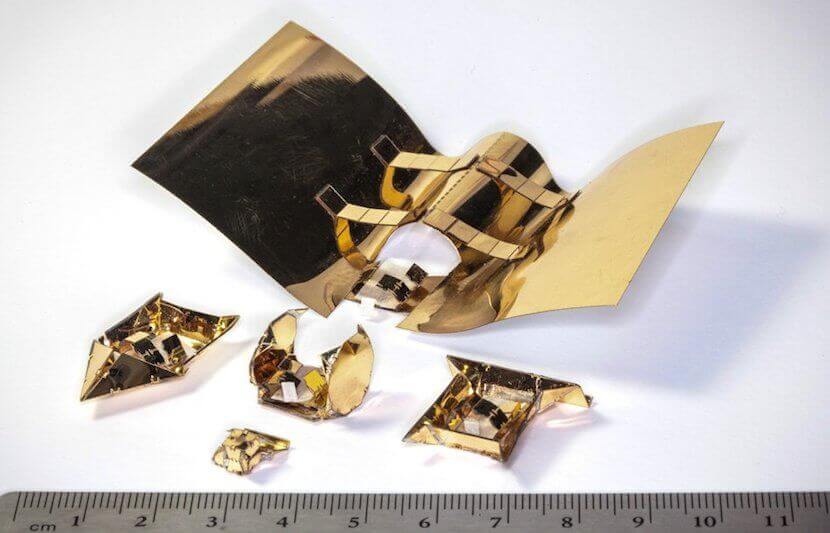
"Unser Ansatz zeigt, dass wir dank der von Origami inspirierten Fertigung vielseitige, zugängliche und wiederverwendbare Roboterkomponenten haben", sagte Rus in einer Erklärung,.
Die Forscher schlagen vor, dass diese Arbeit für eine Reihe von Anwendungen genutzt werden könnte - von der Medikamentenabgabe im Körper bis hin zu zukünftigen Fahrzeugkonstruktionen.
[Divider]
Mozhdeh Shahbazi
Professor für Geomatik an der Universität von Calgary
Autonomer Flug in Roboterfahrzeugen ohne den Einsatz von GPS-Technologie wird dank der Arbeit von zur Realität Mozhdeh Shahbazi und ihre neueste Drohnen-Technologie.
Shahbazi hat ihre akademische und berufliche Laufbahn damit verbracht, die 3D-Mapping- und Modellierungstechnologie in kleinem Maßstab voranzutreiben. Unbemannte Luftfahrzeuge (UAVs) dienen ihr als „Plattform zur Verbesserung von Kartierungs- und Navigationszwecken“.
Bis vor kurzem haben sich UAVs auf GPS-Technologie verlassen, um sie durch die Luft zu leiten.
Dies ist ein Problem, da Wolkenkratzer und andere städtische Infrastrukturen das GPS-Signal abschneiden, wenn die Flugmaschinen städtische Gebiete erreichen. In ländlichen Gebieten tun Bäume dasselbe.
Shahbazi erkannte diese Fehler der vergangenen autonomen Flucht, sah aber Potenzial in der Idee.
„Autonome UAVs oder andere Arten von unbemannten Systemen (Robotern) können als Geodaten-Tools umfassend eingesetzt werden, wenn wir ihnen den richtigen Umgang mit der sie umgebenden Umgebung beibringen, um sich selbst sicher zu navigieren und die von uns gestellten Kartierungsaufgaben zu erfüllen. Sagte sie zu TUN.
"Die Geomatikanwendungen dieser Lösungen, an denen ich interessiert bin, umfassen Infrastrukturinspektion, On-Demand-Notfallkartierung, Stadtmodellierung, Wildtiermanagement und Präzisionslandwirtschaft."
Um auf ein besseres System hinzuarbeiten, plant sie, „visuelle Techniken der präzisen Navigation zu implementieren“, eine „aufgabenbasierte aktive Ansichtsplanung für die autonome Bilderfassung“ zu erstellen und „semantische Stereovisionsberechnung für automatisierte und genaue Bilder zu entwickeln 3D-Zuordnung der Infrastruktur. “
Dies bedeutet, dass ihre neue 3D-Technologie in der Lage sein sollte, die städtischen Infrastrukturen wie Gebäude, Telekommunikationstürme, Stromleitungen und Straßen zu „sehen“, um ihren Standort zu bestimmen.
"Mit mehreren Kameras können UAVs die Umgebung in 360-Graden anzeigen und 3D-Rekonstruktionen in Echtzeit durchführen", sagte sie.
"Diese Informationen werden verwendet, um sowohl die aktuelle Position als auch den nächsten Schritt zu bestimmen. Dabei sollte es nicht nur darum gehen, das gewünschte Ziel sicher zu erreichen, sondern auch die ihm übertragene Aufgabe zu erfüllen."
Obwohl sie ihre Technologie vor Ort noch nicht getestet hat, hat sie mit Augmented Urban Space Modeling Lab an der York University unter der Aufsicht von zusammengearbeitet Gunho Sohn, Dozent für Geomatik an der York University.
[Divider]
Allison Okamura
Professor für Maschinenbau an der Stanford University
Neben anderen Forschern an der Stanford University und der UC Santa Barbara Allison Okamura entwickelte einen "weichen" Roboter, der das kann verlängern Sie die Spitze und ändern Sie die Richtung ohne den Körper zu bewegen.
Da ein solcher Roboter auch in engen oder beengten Räumen gut manövrieren kann, kann er bei Such- und Rettungsoperationen zur Beseitigung von Verstopfungen in Arterien oder zum Tunneln durch Trümmer eingesetzt werden.
Die Inspiration kam von natürlichen Organismen, die durch Wachstum von ihren Spitzen aus Entfernungen zurücklegen, wie z. B. Kletterpflanzen, Pilze und Nervenzellen.
"Im Wesentlichen versuchen wir, die Grundlagen dieses neuen Ansatzes zu verstehen, um Mobilität oder Bewegung aus einem Mechanismus herauszuholen", sagte Okamura in einer Erklärung,.
"Es ist sehr, sehr verschieden von der Art und Weise, wie sich Tiere oder Menschen auf der ganzen Welt bewegen."
Der Roboter ist mit kleinen pneumatischen Steuerkammern und einer Kamera an der Spitze ausgestattet, die von einem Kabel gehalten wird, das durch den Körper verläuft und eine visuelle Rückmeldung über die Umgebung gibt. Der weiche Roboter wächst aufgrund des pneumatischen Drucks in ihm, wie ein aufblasbarer Ballon, der es ihm ermöglicht, die darin enthaltenen Dinge zu transportieren.
Anders als bei einem Ballon führt der Druck beim Softroboter nur dazu, dass sich die Spitze entfaltet. Da sich der Körper des Roboters selbst nicht ausdehnt, sondern die Form der Bahn der Spitze annimmt, führt dies nicht zu einer Gleitreibung zwischen dem Körper und den Wänden der Umgebung.
Diese Eigenschaft ist der Schlüssel für die Fähigkeit des Roboters, enge Räume zu manövrieren.
Das Forschungsteam evaluiert die mögliche Anwendung des Soft Roboters in endovaskulären Operationen.
Im Gegensatz zu herkömmlichen Techniken, die ein Problem darstellen können, wenn ein in ein arterielles System eingesetzter Katheter engere Blutgefäße navigieren muss, ist der weiche Roboter nicht mit derselben Einschränkung konfrontiert. Die Spitze des Roboters würde in der Lage sein, die komplizierten Bahnen des Gefäßsystems zu navigieren und den Katheter auch durch enge Blutgefäße mitzunehmen, ohne die Blutgefäßwände zu beschädigen.
Darüber hinaus wäre der weiche Roboter bei Such- und Rettungsaktionen nützlich, bei denen er verwendet werden könnte, um sich durch Trümmer zu schlängeln, ohne sie zu destabilisieren, und um Menschen, die darunter gefangen sind, Wasser zuzuführen.
Der weiche Roboter würde auch im Baugewerbe mühevoll sein, wo es verwendet werden könnte, um Kabel, Drähte und Schläuche durch enge oder schwer zugängliche Räume zu führen.
[Divider]
Kathleen O'Donnell
Personal Industrial Designer, Wyss Institute an der Harvard University
Als Mitarbeiter des Wyss Institute Kathleen O'Donnell Das führte zu dem Versuch, eine Roboter- „Exosuit“ -Technologie in die Klinik zu übertragen ermöglicht es Schlaganfallopfern, normal zu gehen.
Die Technologie wurde von einem Forschungsteam an der John A. Paulson School of Engineering und Applied Sciences (SEAS) der Harvard University in Zusammenarbeit mit dem Wyss Institute for Biological Inspired Engineering in Harvard und dem College of Health & Rehabilitation Sciences der Boston University entwickelt: Sargent College ist ein Roboteranzug, der an einem Hemiparese-Glied oder einem Glied mit Mobilitätsverlust befestigt wird.
Der Exosuit wird in Form eines hautengen Kleidungsstücks an dem von Hemiparese befallenen Glied befestigt und verwendet mechanische Kraft, um die zusätzliche Kraft bereitzustellen, die erforderlich ist, damit sich das Glied normal bewegt.
Der Exosuit wird von einer Batterie angetrieben, die an einem Hüftgurt getragen wird, und die Kraft wird über eine Reihe von Kabeln auf das betroffene Glied übertragen, ähnlich wie die Muskeln in unserer Handfläche und im Unterarm unsere Finger mit Sehnen bewegen.

O'Donnell interessierte sich für den Prototyp und arbeitete mit ReWalk Robotik, ein Unternehmen, das mechanische Geräte herstellt und vertreibt, um Menschen mit eingeschränkten ambulanten Fähigkeiten zu helfen, ist eine Partnerschaft mit dem Ziel eingegangen, auf der Basis des Prototyps Exosuits in Massenproduktion und in großem Umfang zu vermarkten.
O'Donnell selbst hatte zuvor als Außendiensttechnikerin für Integra Neurosciences gearbeitet und einige der realen Herausforderungen im Operationssaal und auf der Intensivstation aus erster Hand beobachtet.
„Was die Entwicklung des Soft Exosuits so einzigartig macht, ist der extreme multidisziplinäre Charakter der Arbeit. Zusätzlich zu unserer vielfältigen technischen Expertise als Team war unsere Forschung mit freiwilligen Studienteilnehmern von zentraler Bedeutung für unser Verständnis, wie wir diese Schutzanzüge entwerfen und bauen müssen “, sagte sie in einer Erklärung,.
Zusammenfassung
Die heutige Technologie kann unglaubliche Leistungen erbringen, und Roboter sind auf dem besten Weg, Aufgaben in nahezu allen Bereichen der Wissenschaft zu erfüllen.
Jede dieser Frauen hat bedeutende Arbeit geleistet, um beeindruckende neue Maschinen zu konzipieren, zu entwerfen und zu fördern.

